JeÅželi do oprogramowania inÅžynierskiego moÅžna podpiÄ Ä wÅasne procedury to NVIDIA udostÄpnia darmowy driver NVCC za pomocÄ ktÃģrego moÅžna kompilowaÄ kod napisany w C. MoÅžna to robiÄ z Visual Studio (od wersji 10) pod Windows lub uÅžywajÄ c gcc pod Linuxem.
WÃģwczas oprogramowanie optymalizuje siÄ pod posiadanÄ kartÄ graficznÄ . Warto mieÄ kartÄ o CUDA capability wiÄkszym niÅž 2.0 ze wzglÄdu na obsÅugÄ typu double.Zobacz Komentarze NewsÃģw
Czy ktoÅ z forum korzysta moÅže z Elmera? Bardzo ciekawi mnie jak to dziaÅa. Bo z tego tutka wynika, Åže jest OK, a tymczasem ja prÃģbowaÅem... bezskutecznieZobacz Komentarze NewsÃģw
...W chwili obecnej czÄsto stosowanym podejÅciem jest metoda analizy z wykorzystaniem podejÅcia hybrydowego. W metodzie tej wykorzystuje siÄ obliczone pole siÅ wewnÄtrznych z analizy naprÄÅženiowej dla modyfikacji pola przemieszczeÅ. Technika hybrydowa analizy zagadnieÅ kontaktowych oparta jest na prostym pomyÅle. Dany model moÅžna opisaÄ rÃģwnaniem przemieszczeniowym (wyprowadzonym w oparciu o funkcjonaÅ Lagranger17;a) postaci:
[K] {u}= {R} (53)
gdzie :
[K] - macierz sztywnoÅci,
{u} - wektor przemieszczeÅ wÄzÅowych,
{R}- wektor siÅ wÄzÅowych ,
bÄ dÅš rÃģwnaniem naprÄÅženiowym (wyprowadzonym w oparciu o funkcjonaÅ Castigliano):
[F] {R}={u} (54)
gdzie :
[F] - macierz podatnoÅci,
a pozostaÅe oznaczenia jak poprzednio.
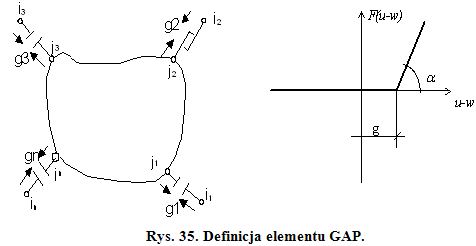
(W rÃģwnaniu (53) wystÄpujÄ warunki brzegowe siÅowe zaÅ w rÃģwnaniu (54) zadane sÄ w przemieszczeniach.) Dalej naleÅžy zdefiniowaÄ pewien typ elementu skoÅczonego - szczelinÄ (ang. GAP). BÄdzie to element o dwu wÄzÅach, w ktÃģrym definiuje siÄ kierunek przemieszczenia moÅžliwego bez oporÃģw, z jednoczesnym okreÅleniem wstÄpnego dystansu. PojÄcie to wyjaÅnia rysunek .
Warto zauwaÅžyÄ, Åže definicja, dziÄki swej uniwersalnoÅci pozwala zdefiniowaÄ peÅnÄ postaÄ szczeliny, a wiÄc ograniczenie z luzem dwustronnym.
PrzyjmujÄ c okreÅlenie
ugi = u2i - u1i , (55)
gdzie :
ugi - przemieszczenie wywoÅane obciÄ Åženiem zewnÄtrznym {R},
u2i , u1i - przemieszczenia wÄzÅÃģw definiujÄ cych szczelinÄ,
moÅžna przedstawiÄ nierÃģwnoÅÄ definiujÄ cÄ stan szczeliny (zamkniÄta - otwarta):
ugi > gi , (56)
Warto zauwaÅžyÄ, Åže dziÄki temu, Åže rÃģwnania (53), (54) posiadajÄ dopeÅniajÄ ce siÄ warunki brzegowe podany ukÅad rÃģwnaÅ jest kompletny. W tym miejscu istniejÄ dwie drogi postÄpowania. Po pierwsze, jeÅželi rÃģwnanie (54) zostanie okreÅlone dla caÅego ciaÅa. Po drugie, moÅžna przepisaÄ rÃģwnanie (54) tylko dla elementÃģw typu GAP:
[FG] {Rg} = {uG}
( 57)
w rÃģwnaniu tym {Rg} to wektor siÅ przenoszonej przez elementy typu GAP, zaÅ {uG} wektor odpowiadajÄ cych im przemieszczeÅ. Macierz [FG] moÅžemy okreÅliÄ przykÅadajÄ c jednostkowe obciÄ Åženia w kierunku dziaÅania elementÃģw GAP. Wtedy przemieszczenie wzglÄdne wywoÅane tym obciÄ Åženiem we wszystkich takich elementach bÄdzie zdeterminowane. Aby otrzymaÄ caÅÄ macierz [FG] proces naleÅžy powtÃģrzyÄ dla wszystkich elementÃģw typu GAP.
W obu proponowanych metodach stosujÄ c metodÄ hybrydowÄ moÅžna okreÅliÄ, na podstawie rÃģwnania (53), stan odksztaÅcenia ciaÅa wywoÅany obciÄ Åženiami zewnÄtrznymi. Przy zdefiniowanych warunkach kinematycznych (55), (56) rÃģwnanie (54) pozwala obliczyÄ reakcje dziaÅajÄ ce w wÄzÅach definiujÄ cych elementy typu GAP. JeÅželi w miejsce rÃģwnania (54) zastosuje siÄ rÃģwnanie ( 57), wtedy niezbÄdny staje siÄ proces iteracyjny. Jest to rozwiÄ zanie efektywniejsze numerycznie od zastosowania rÃģwnania peÅnego, zwÅaszcza jeÅželi elementÃģw typu GAP jest w modelu niewiele. DodatkowÄ zaletÄ omawianej metody jest moÅžliwoÅÄ prostej implementacji zjawiska tarcia. PodstawowÄ informacjÄ o miejscu styku, ktÃģrÄ uzyskuje siÄ w trakcie analizy jest siÅa wzajemnego oddziaÅywania stykajÄ cych siÄ elementÃģw. Åatwo rÃģwnieÅž okreÅliÄ zwrot wektora wzajemnej prÄdkoÅci. JeÅželi zdefiniuje siÄ wspÃģÅczynnik tarcia dla miejsca styku, okreÅlony bÄdzie komplet informacji niezbÄdnych do obliczenia siÅy tarcia panujÄ cej w danym momencie: siÅa docisku, wspÃģÅczynnik tarcia, wzglÄdna rÃģÅžnica prÄdkoÅci stykajÄ cych siÄ ciaÅ...
Edytowane przez piotr dnia 01/01/2012 18:41
1. Sprawa jest znacznie trudniejsza. Elementy typu GAP stanowiÄ jeden z moÅžliwych, raczej wstÄpnych ujÄÄ zagadnieÅ kontaktowych. Zasadniczo tylko do problemÃģw node2node. Procedury obliczeÅ kontaktowych dla dwu i trÃģjwymiarowych elementÃģw muszÄ uwzglÄdniaÄ rÃģwnieÅž problemy penetracji, czego GAP nie ujmuje. Zagadnienia kontaktowe node2surface, surface2surface wymagajÄ bardziej skomplikowanych procedur i tam ujÄcie hybrydowe nie wystarcza. SzczegÃģÅy niestety nie sÄ podawane w helpach programow.
2. Polskiej literatury,co oczywiste chyba, w zasadzie nie ma. MoÅžna poleciÄ pracÄ Litewki na temat zagadnieÅ kontakowych elementÃģw belkowych. Facet pracowaÅ w PPoz, teraz chyba poza krajem ale praca powinna byÄ dostÄpna w pdf w sieci. Na temat kontaktu wiÄc tylko prace po angielsku Bathe i Crisfield. Poza tym moÅžna poleciÄ materiaÅy publikowane przez NAFEMS. MoÅžna bez czÅonkowska teÅž pewne prace kupiÄ ale bardziej opÅaca siÄ wykupiÄ members choÄby nawet na 1 rok.
Jak ktoÅ chce trochÄ bardziej zaawansowanej teorii to polecam na poczÄ tek pracÄ, ktÃģrÄ juÅž gdzieÅ na tym forum polecaÅem:
http://prace.ippt.gov.pl/IFTR_Reports_4_2007.pdf
Tylko zalogowani mogÄ dodawaÄ posty w shoutboksie.
Bulix 26.01.2022 Witam, szukam osoby ktÃģra ogarnia program FEMM.
damian14100 25.01.2022 Witam,
Czy znajduje siÄ na forum osoba ktÃģra ma doÅwiadczenie w obliczeniach wytrzymaÅoÅciowych wÃģzkÃģw wagonowych ?
BE-FEA 31.03.2021 Nie pracujÄ w Deform, ale moÅže coÅ podpowiem na zasadzie analogii do innych programÃģw MES. Napisz jeÅli nadal aktualne.
daniel8894 31.03.2021 Czy pomÃģgÅby ktoÅ w zrobieniu symulacji procesu skrawania w Deform 3 d
BE-FEA 09.03.2021 Postaram siÄ pomÃģc, zapraszam do kontaktu jeÅli nadal aktualne.
kinia22 09.03.2021 witam, potrzebuje kogoÅ kto pomoÅže w przygotowaniu projektu w programie COMSOL - przeplyw ciepÅa przez oÅrodek porowaty!
BE-FEA 02.04.2020 PrzerobiÅo mi jednÄ literÄ na emotkÄ. Chodzi o przycisk new thread
BE-FEA 02.04.2020 Åŧeby dodaÄ nowy temat wystarczy wejÅÄ w odpowiedni dziaÅ i kliknÄ Ä maÅy przycisk "ew thread" po prawej stronie.
KrzywaOHIO 30.03.2020 Jak dodaÄ nowy wÄ tek na forum?
Konrad96 02.12.2019 Witam, czy jest tu ktoÅ kto dobrze zna siÄ na programie Robot struktural i pomÃģgÅby mi zamodelowaÄ belkÄ ÅželbetowÄ podobnÄ do belki uÅžytej w badaniu? ProszÄ o kontakt jeÅli ktoÅ chciaÅby pomÃģc



 UÅžytkownicy Online
UÅžytkownicy Online










 ew thread" po prawej stronie.
ew thread" po prawej stronie.


